
...или так ли страшен робот как им пугают
Содержание:
2. ФУНКЦИОНАЛЬНАЯ И ЭЛЕКТРИЧЕСКАЯ СХЕМЫ
4. ООБЕННОСТИ РАБОТЫ ПРИВОДА ПЕРЕКЛЮЧЕНИЯ
5. ОСОБЕННОСТИ РАБОТЫ ПРИВОДА СЦЕПЛЕНИЯ
Хочу сразу обратить внимание на то, что роботизированная коробка, несмотря на схожесть в управлении, количество педалей и ручку селектора – совсем не автоматическая коробка с гидротрансформатором. Если для АКПП стояние на месте с включённой передачей – дело естественное (хотя тоже не очень то полезное), то для "робота" это кратчайший путь к различным проблемам и досрочной замене сцепления. Почему так? Потому что роботизированная КПП – это обычная механическая КПП с обычным сцеплением, только вместо водителя "нажимает" сцепление и переключает передачи автоматика. Эта автоматика внимательно следит за действиями водителя, но она не сам водитель, она не может знать, какое действие предпримет водитель в следующее мгновение, а поэтому всегда стремится быть готовой к любому допустимому развитию событий, и прежде всего это касается управлению сцеплением. Например: водитель с МКПП, когда готовится к началу движения, выключает сцепление (нажимает педаль) и включает первую передачу, далее он начинает отпускать сцепление и нажимает педаль "газа", причём делает это одновременно. А робот в этой ситуации выключает сцепление, включает передачу и "отпускает" сцепление до начала схватывания, в этой позиции робот ждёт реакции водителя. Как только водитель отпускает тормоз и нажимает на газ, робот продолжает включение сцепления и автомобиль начинает движение. Т.е. во время "стоянки" с включённой передачей сцепление пребывает в состоянии лёгкого скольжения, естественно греется, а частые и длительные "стоянки" сжигают сцепление "в хлам". Поэтому даже во время коротких остановок, ручку КПП надо переводить в положение "N". Запомните это и научите этому своих женщин!
Устройство
Как было сказано выше, роботизированная КПП это та же механическая КПП с обычным сцеплением, только управление сцеплением и переключение передач осуществляет автоматика. Коробка передач действительно та же, что и на машинах с МКПП, пробовали менять – подходит.
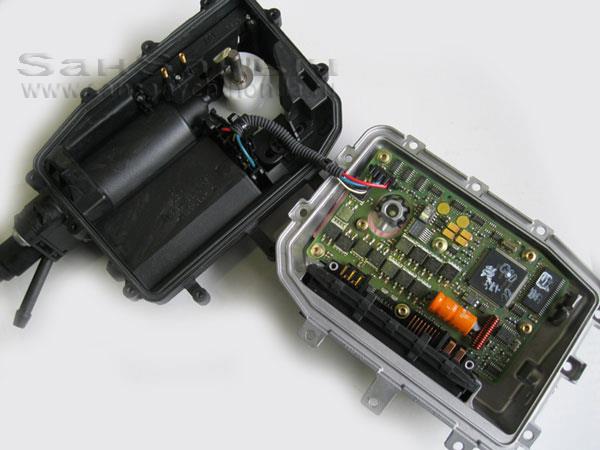
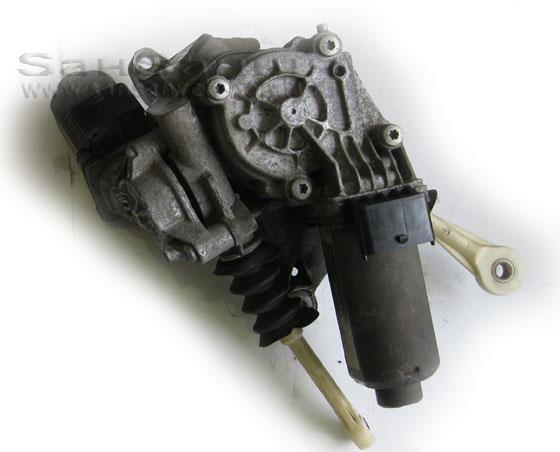
 Вот как выглядит "робот": сверху установлен сервопривод механизма переключений передач, состоящий из привода выбора и привода переключения, тяги которых соединены с механизмом переключения передач КПП. А рядом (на Civic это место под аккумулятором) в отдельном корпусе сервопривод сцепления с блоком управления (можно сказать, что мозги робота находятся в коленке левой ноги). Сервопривод сцепления объединён с главным цилиндром гидравлического привода сцепления. Рабочий цилиндр такой же, как и у сцепления с обычной МКПП.
Вот как выглядит "робот": сверху установлен сервопривод механизма переключений передач, состоящий из привода выбора и привода переключения, тяги которых соединены с механизмом переключения передач КПП. А рядом (на Civic это место под аккумулятором) в отдельном корпусе сервопривод сцепления с блоком управления (можно сказать, что мозги робота находятся в коленке левой ноги). Сервопривод сцепления объединён с главным цилиндром гидравлического привода сцепления. Рабочий цилиндр такой же, как и у сцепления с обычной МКПП.
Функциональная и электрическая схемы.

Модуль управления TCM и исполнительный элемент (сервопривод) сцепления объединены в одном блоке. У поршня главного цилиндра имеется датчик положения.
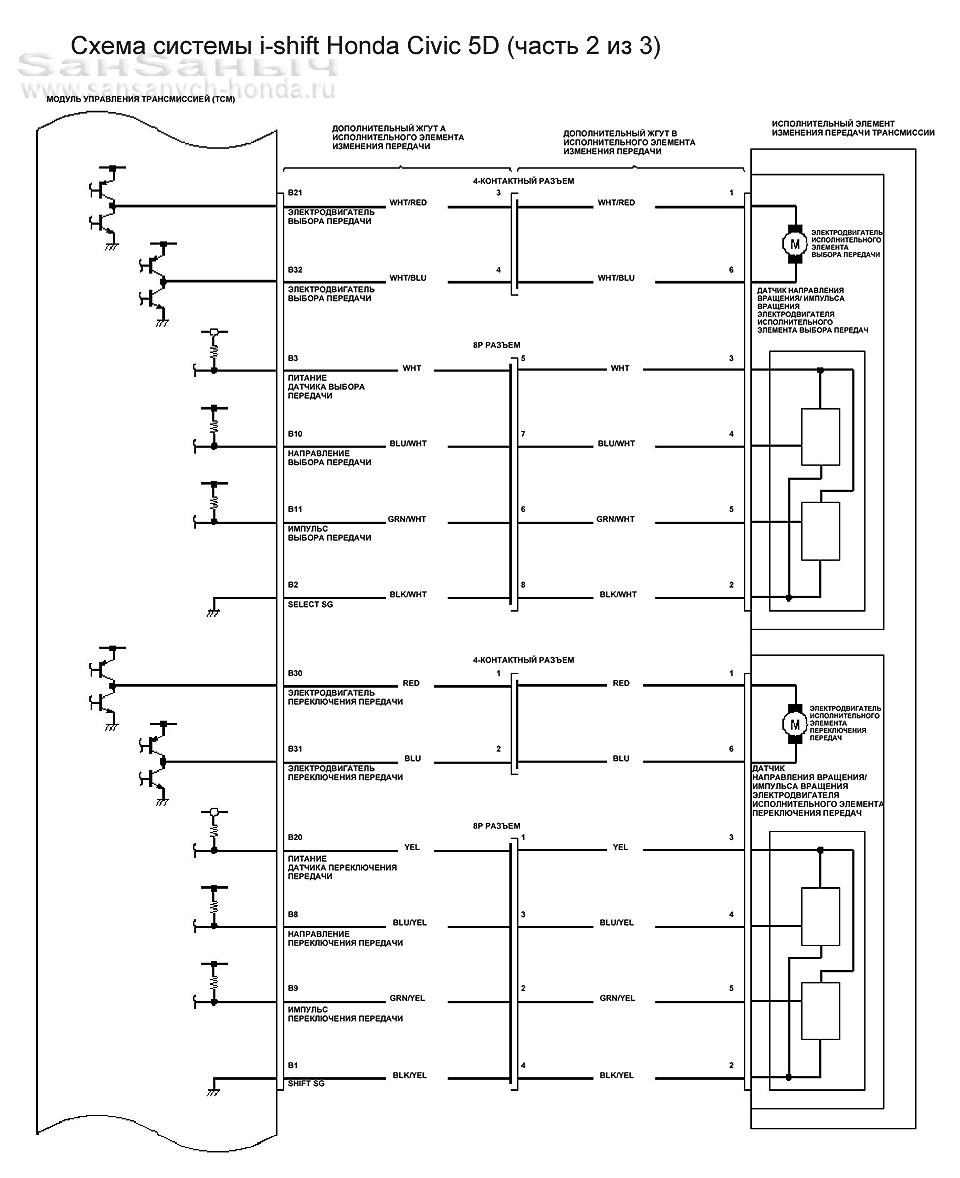
 К модулю напрямую подсоединены привод выбора передачи (это тот, который двигает виртуальную ручку КПП слева направо) и привод переключения передач (это тот, который включает передачи движением виртуальной ручки вперёд и назад). Каждый из этих приводов оснащён датчиками направления и импульса вращения мотора (их можно увидеть на электрической схеме).
К модулю напрямую подсоединены привод выбора передачи (это тот, который двигает виртуальную ручку КПП слева направо) и привод переключения передач (это тот, который включает передачи движением виртуальной ручки вперёд и назад). Каждый из этих приводов оснащён датчиками направления и импульса вращения мотора (их можно увидеть на электрической схеме).
От блока управления двигателем(ECM) TCM напрямую получает сигналы о скорости автомобиля (VSSAMT), включении стартера (STS), состоянии стояночного тормоза (BKAWD), о запуске двигателя (WEN). TCM выдаёт в ECM разрешение на запуск двигателя (STEN).
Всё остальное взаимодействие осуществляется в цифровом виде по шине CAN:
- с блоком управления двигателем TCM (данные о нажатии педали тормоза, оборотах двигателя, нагрузке на двигатель т.д.);
- с блоком ABS/VSA ведётся двусторонний обмен данными (какими точно сказать не могу, но очевидно, что VSA прекращает работу при неисправности в трансмиссии, а в момент коррекции заноса или пробуксовки TCM получает запрет на переключение передач для избежания прерывания крутящего момента);
- с приборной панелью (индикаторы панели);
- с модулем управления переключением передач, он включает в себя ручку селектора режимов КПП и подрулевые клавиши выбора передач.
Для диагностики неисправностей TCM имеет прямой выход на диагностический разъём.
Хочу обратить внимание, что система не имеет датчика температуры сцепления. Перегрев сцепления (например код неисправности: P19E6 (164-1) Температура сцепления слишком высокая (более 300 °C) ) вычисляется TCM по косвенным признакам.
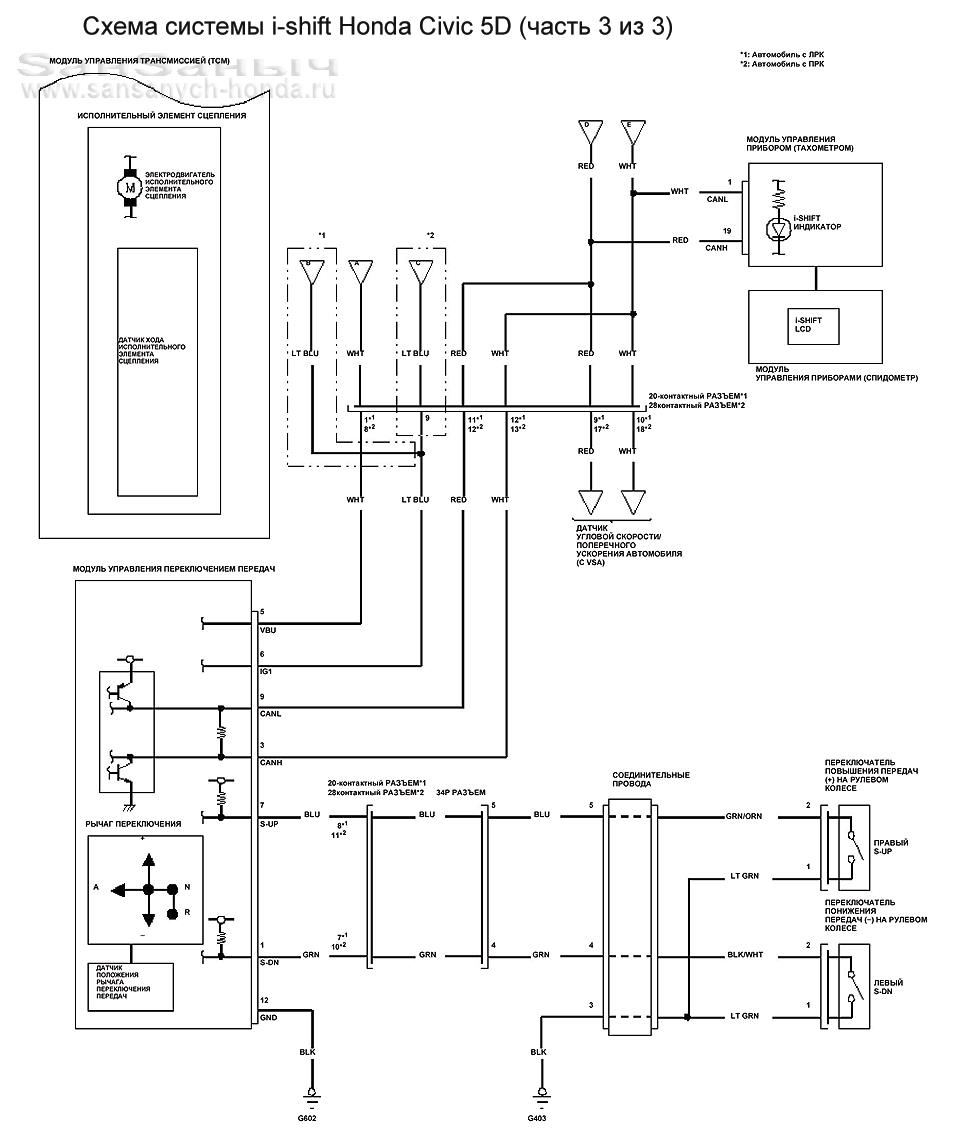
Подробнее это всё можно увидеть на электрической схеме, хотя она наверное будет интересна разве что специалистам. Поэтому я выкладываю схему системы "i-shift" для Civic 5D 2007 модельного года в качестве справочного материала (что бы открыть схему в полном размере нужно кликнуть на эскиз) и перехожу к описанию функционирования "робота".
 |
 |
 |
Функционирование
Принципы управления роботизированной КПП во многом схожи с управлением классической АКПП, но вместе с тем имеют некоторые особенности присущие именно механическим КПП.
При включении зажигания и нахождении ручки селектора в положении "N", "робот" делает жест знакомый каждому водителю – проверяет "нейтраль" в коробке передач. TCM приводит в действие привод выбора передачи и перемещает его поочерёдно в крайние положения. Если никакая передача не включена, то привод остаётся в нейтральном положении. Если включена передача, то задействуется привод включения передачи, передача выключается и снова проверяется "нейтраль".
При включении зажигания и нахождении ручки селектора в положении "A" или "R" никакие действия не производятся, пока селектор не будет переведён в положение "N". TCM блокирует включение стартера, если не нажата педаль тормоза, селектор не находится в положении "N", механизм переключения передач не установлен в нейтральное положение, в системе обнаружена неисправность не допускающая дальнейшую эксплуатацию трансмиссии. Если условия для запуска двигателя соблюдены, то TCM выдаёт в ECM сигнал разрешения на работу стартера STEN.
После запуска двигателя включение режимов движения осуществляется только при нажатой педали тормоза.
При включении режима "A" включается первая передача и далее, если не переходить на ручное управление переключениями передач, "робот" автоматически управляет сцеплением и переключает передачи.
В положении "R" соответственно включается задняя передача. При этом существует защита от случайного включения - задняя передача не включится, если автомобиль движется со скоростью больше 3 км/ч, даже при нажатой педали тормоза.
При трогании с места в горку, "роботу" нужно помочь стояночным тормозом - включить "ручник", отпустить педаль тормоза и плавно нажимая педаль "газа" отпустить "ручной тормоз". Не стоит пытаться быстро отпустить тормоз и резко нажать на "газ" - для сцепления это будет шоковая терапия, двигатель может заглохнуть, а автомобиль откатиться.
Принудительной блокировки трансмиссии, такой как "паркинг" в АКПП, у системы "i-shift" нет. Поэтому если автомобиль паркуется на уклоне, то перед тем как заглушить двигатель селектор нужно оставить в положении "A", тогда после остановки двигателя "робот" отпустит сцепление и в коробке передач останется включённой 1-я передача.
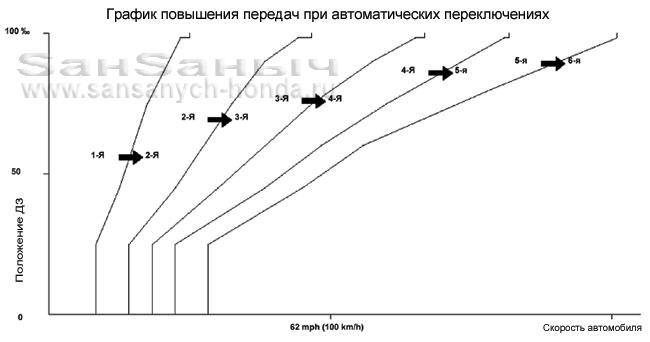 При включении режима "A" "робот" функционирует в режиме автоматического переключения передач. Основными критериями для выбора передач являются скорость автомобиля и положение дроссельной заслонки. Как видно из графиков: чем сильнее нажата педаль газа, тем позже происходят переключения на повышенные передачи (алгоритм такой же как и в АКПП).
При включении режима "A" "робот" функционирует в режиме автоматического переключения передач. Основными критериями для выбора передач являются скорость автомобиля и положение дроссельной заслонки. Как видно из графиков: чем сильнее нажата педаль газа, тем позже происходят переключения на повышенные передачи (алгоритм такой же как и в АКПП).
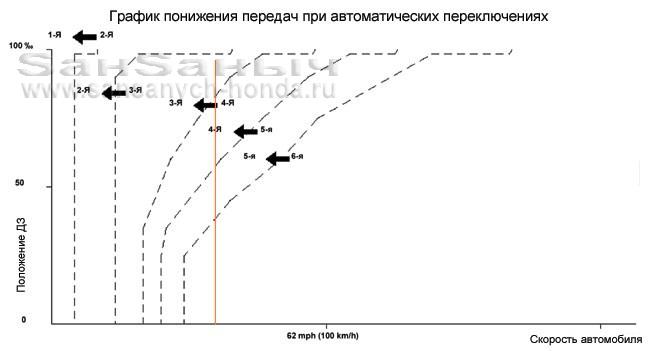 Примерно такой же алгоритм для переключений на пониженные передачи при замедлении. На графиках видно, что чем сильнее нажата педаль газа, тем раньше происходят переключения на низшие передачи. Таким образом, если при движении с постоянной скоростью нажать сильнее на "газ", то наступают условия для переключения на пониженную передачу или даже на две. Например: машина движется со скоростью 60 км/ч (красная линия на графике), на 5-й передаче с открытием ДЗ около 40%. Нажимаем сильнее "газ" до 60% и попадаем в зону, где должна быть включена 4-я передача. А если нажать "тапку в пол" на 100%, то автоматически переключимся уже на 3-ю. Таким образом реализована функция так называемого "kick-down".
Примерно такой же алгоритм для переключений на пониженные передачи при замедлении. На графиках видно, что чем сильнее нажата педаль газа, тем раньше происходят переключения на низшие передачи. Таким образом, если при движении с постоянной скоростью нажать сильнее на "газ", то наступают условия для переключения на пониженную передачу или даже на две. Например: машина движется со скоростью 60 км/ч (красная линия на графике), на 5-й передаче с открытием ДЗ около 40%. Нажимаем сильнее "газ" до 60% и попадаем в зону, где должна быть включена 4-я передача. А если нажать "тапку в пол" на 100%, то автоматически переключимся уже на 3-ю. Таким образом реализована функция так называемого "kick-down".
Если в положении "A" селектора режимов сдвинуть ручку вперёд (в положение "+") или назад (в положение "-"), или нажать подрулевые лепестки "+" или "-", TCM переходит в режим ручного управления переключениями передач и остаётся в этом режиме до тех пор, пока ручка селектора не будет переведена в положение "N", а затем снова включен режим "A".
В режиме ручного управления передачи переключаются по командам водителя, но во избежание повреждения трансмиссии или двигателя на переключения наложены ограничения, суть которых изложена на двух следующих диаграммах:

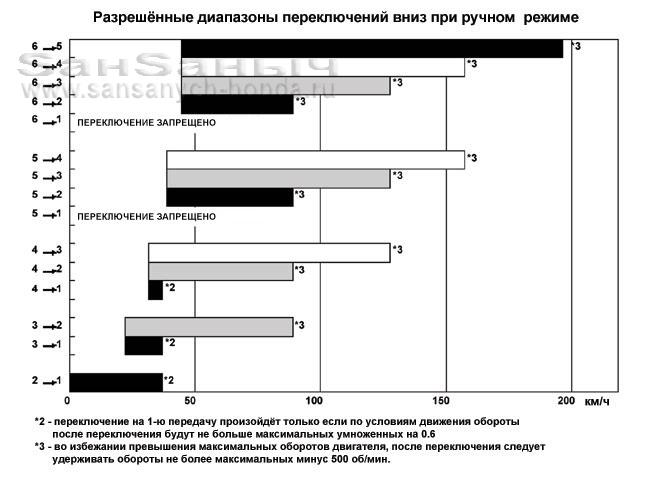
Если водитель пытается сделать переключение, которое в данных условиях движения недопустимо, переключение передачи не происходит.
Во избежании случайных переключений передач, учитывается продолжительность нажатия ручки или подрулевых лепестков - TCM игнорирует слишком частые включения. Если время переключения составляет меньше 110 мс (60 мс для ВКЛ, 50 мс для ВЫКЛ), раздается звуковой сигнал, и переключение передачи не выполняется.
Особенности работы привода переключения.
 Как уже говорилось, привод переключения состоит из привода выбора передач (осуществляет поперечное движение кулисы) и привода включения передач (продольное движение кулисы) собранных в одном корпусе. Приводы представляют собой электромоторы с червячными редукторами и зубчатыми парами "колесо-шток". Штоки через шаровые шарниры соединены с тягами, которые соединены с механизмом переключения передач.
Как уже говорилось, привод переключения состоит из привода выбора передач (осуществляет поперечное движение кулисы) и привода включения передач (продольное движение кулисы) собранных в одном корпусе. Приводы представляют собой электромоторы с червячными редукторами и зубчатыми парами "колесо-шток". Штоки через шаровые шарниры соединены с тягами, которые соединены с механизмом переключения передач.
В приводах нет датчиков положения, но есть датчики направления вращения мотора и импульса вращения (знакомые многим датчики Холла). По этим датчикам определяются положения приводов и сопротивление, которое оказывают приводам механизм переключения передач.
 TCM "помнит" крайние точки хода привода выбора (ход "слева-направо") и делит этот диапазон на 4 части. Привод включения работает "до упора", но при этом TCM должен учитывать сопротивление синхронизаторов и не реагировать на замедление электромотора до достижения точки включения передачи. Т.е. "робот" действует точно так же как и живой водитель – перемещает "виртуальную ручку КПП" в поперечном направлении по памяти, а в продольном до упора с учётом работы синхронизаторов. А раз так, то "роботу" так же как и человеку, необходимо обучение, в ходе которого он запомнит крайние положения приводов от которых будет координировать свою работу в дальейшем. Процедура обучения производится при помощи фирменной диагностической системы HDS, об этом будет рассказано ниже.
TCM "помнит" крайние точки хода привода выбора (ход "слева-направо") и делит этот диапазон на 4 части. Привод включения работает "до упора", но при этом TCM должен учитывать сопротивление синхронизаторов и не реагировать на замедление электромотора до достижения точки включения передачи. Т.е. "робот" действует точно так же как и живой водитель – перемещает "виртуальную ручку КПП" в поперечном направлении по памяти, а в продольном до упора с учётом работы синхронизаторов. А раз так, то "роботу" так же как и человеку, необходимо обучение, в ходе которого он запомнит крайние положения приводов от которых будет координировать свою работу в дальейшем. Процедура обучения производится при помощи фирменной диагностической системы HDS, об этом будет рассказано ниже.
Особенности работы привода сцепления.
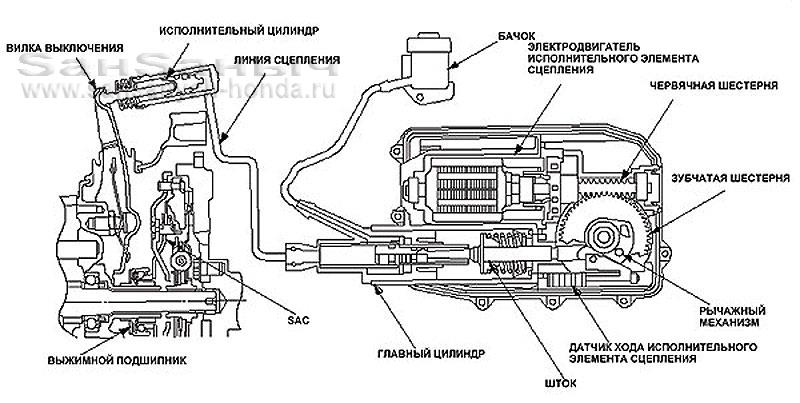 "Электронная нога" в своей работе ориентируется на датчик положения поршня. т.е. TCM всегда знает истинное положение привода главного цилиндра. Это необходимо для более "деликатного" управления сцеплением, в ходе которого "робот" сталкивается с двумя специфическими проблемами:
"Электронная нога" в своей работе ориентируется на датчик положения поршня. т.е. TCM всегда знает истинное положение привода главного цилиндра. Это необходимо для более "деликатного" управления сцеплением, в ходе которого "робот" сталкивается с двумя специфическими проблемами:
Первую проблему я описывал в предисловии - TCM не знает какое действие предпримет водитель в следующее мгновение, а значит действия привода должны следовать за действиями водителя, и он всегда будет в роли отстающего. "Робот" вынужден минимизировать это отставание, а значит при начале движения, остановке и иных манёврах, должен держать сцепление на грани "схватывания", что бы не тратить драгоценное время на свободный ход.
Вторая проблема: в процессе переключения передач разрывается связь двигателя с трансмиссией и прерывается крутящий момент, и это не контролируется водителем. К тому же "роботу" приходится вмешиваться в работу двигателя и в ходе переключения передач прикрывать дроссельную заслонку, что бы избежать "заброса оборотов", поскольку водитель продолжает нажимать на "газ". Всё это негативно сказывается на безопасности вождения, поэтому необходимо минимизировать время переключения и прерывание крутящего моментя. Для этого сцепление не должно выключаться полностью, а только до точки "схватывания" и оставаться с состоянии небольшой пробуксовки.
Для обеспечения такого "тонкого" управления привод должен быть точно настроен под сцепление, ведь любой водитель знает, что у каждой машины "своё" сцепление со своим характером и особенностями, которые к тому же склонны меняться со временем. Настройка привода производится во время обучения, в ходе которого TCM запоминает положение начала "схватывания" сцепления, а также коэффициент трения в промежуточных положениях. В дальнейшей работе TCM ориентируется на запомненные настройки и коррекцию настроек не производит. Это означает, что со временем качество переключений будет ухудшаться и потребуется визит к дилеру или в сервис, в котором имеется фирменная диагностическая система HDS, для выполнения обучения.
Обучение системы "i-shift".
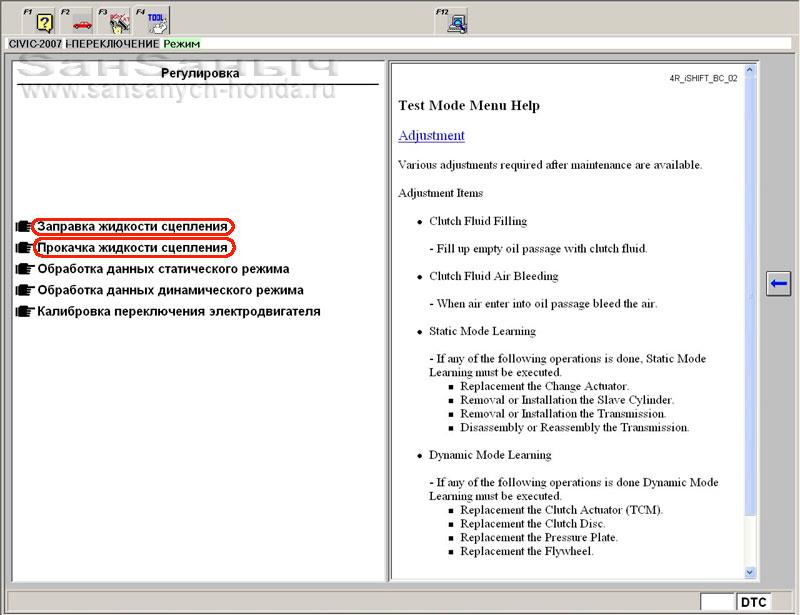
Процедуры обучения TCM скомпонованы в две программы: "Программирование в статическом режиме" и "Программирование в динамическом режиме" и входят в состав диагностического комплекса HDS. В русскоязычной версии они называются "Обработка данных..." – это издержки машинного перевода. В дальнейшем я постараюсь давать более правильные названия, поэтому не надо удивляться различиям в тексте и на картинках.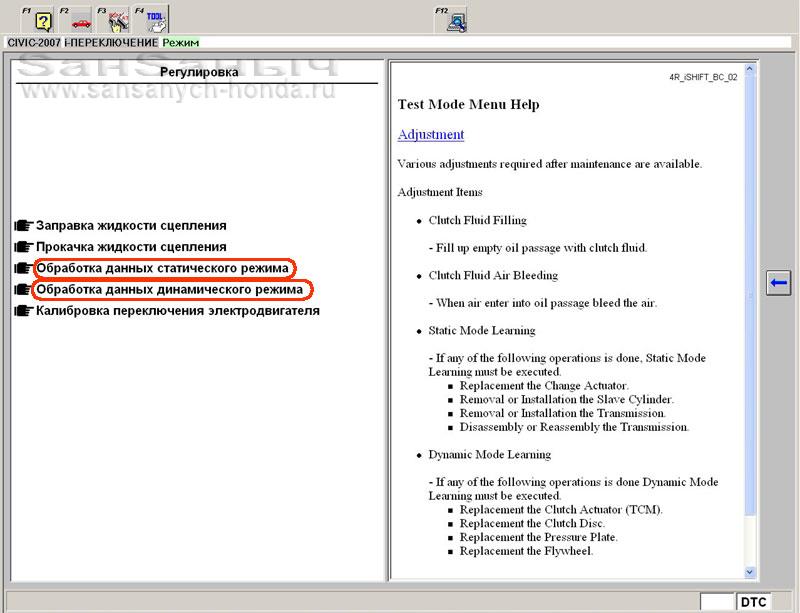
Программирование в статическом режиме включает в себя:
1. Программирование положений привода переключения передач.
2. Программирование положений синхронизации.
3. Программирование положения включения сцепления 1.
4. Программирование положения включения сцепления 2.
5. Программирование положения включения сцепления 3.
Этот режим выполняется на месте, на полностью собранном и исправном автомобиле. В ходе обучения потребуется заводить двигатель. В течение всей процедуры зажигание должно быть включено, поэтому если нет уверенности в свежести аккумулятора, лучше сразу подключить зарядное устройство или резервный аккумулятор, что бы потом не повторять процедуру заново.
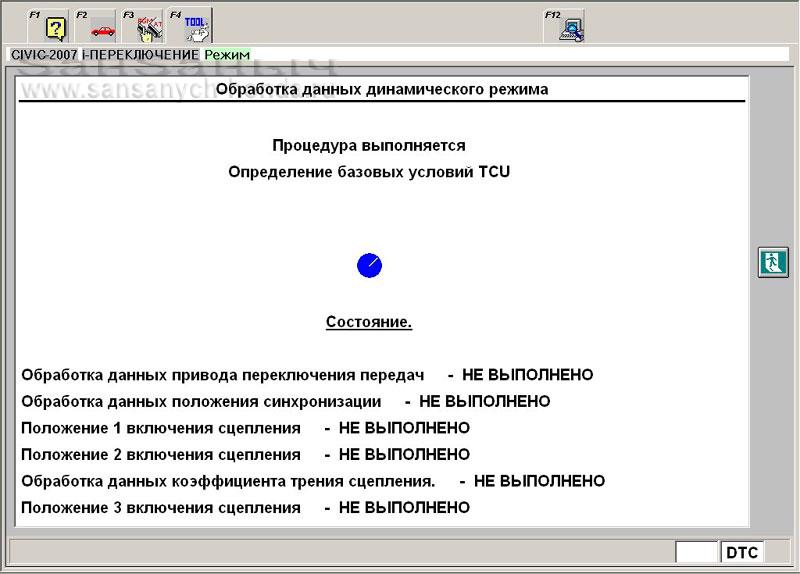
Программирование в динамическом режиме отличается от статического наличием ещё одного пункта, который выполняется на автомобиле в движении:
1. Программирование положений привода переключения передач.
2. Программирование положений синхронизации.
3. Программирование положения включения сцепления 1.
4. Программирование положения включения сцепления 2.
5. Программирование коэффициента трения сцепления.
6. Программирование положения включения сцепления 3.
Для выполнения обучения в движении необходимо, что бы HDS была установлена на мобильном компьютере с независимым источником питания.
После начала программы, она обязательно должна быть выполнена до конца, в противном случае TCM заблокирует запуск двигателя и движение на автомобиле будет невозможно!
Рассмотрим все процедуры поочерёдно (кликните на картинку, что бы открыть её в полном размере):
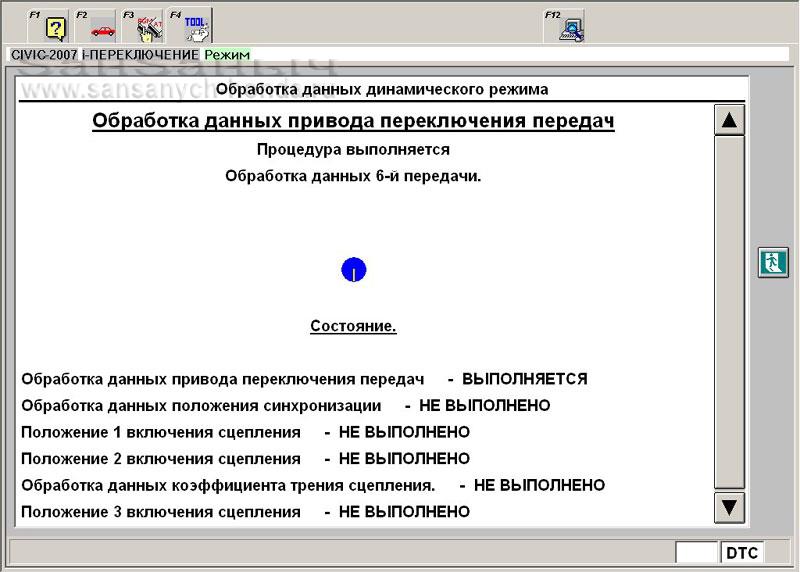
1. Программирование положений привода переключения передач.
 |
 |
 |
Данная процедура выполняется при неработающем двигателе. Привод переключения передач проверяет нейтраль, затем поочередно включает передачи и TCM запоминает усилия на моторах привода для каждой передачи. Для этого сначала обрабатываются включения крайних ходов кулисы: сперва 1-я и 2-я, затем задняя, а потом средних ходов: 5-я и 6-я, 3-я и 4-я.
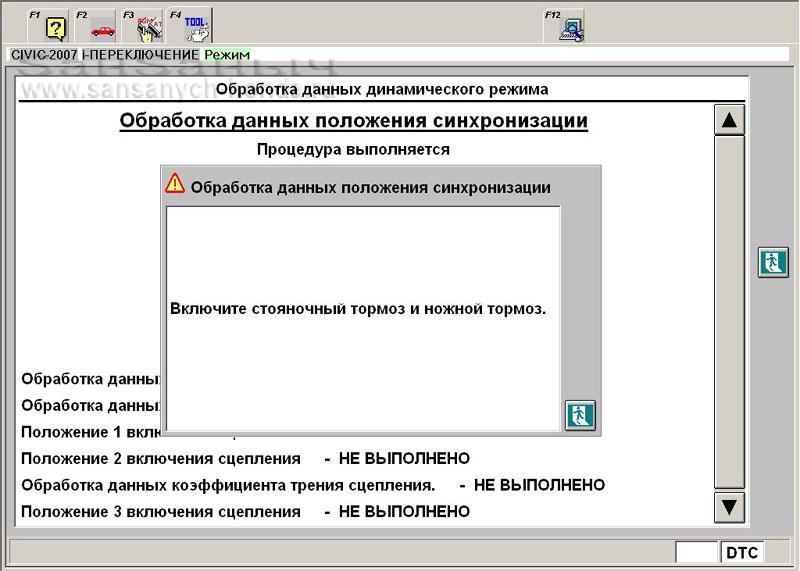
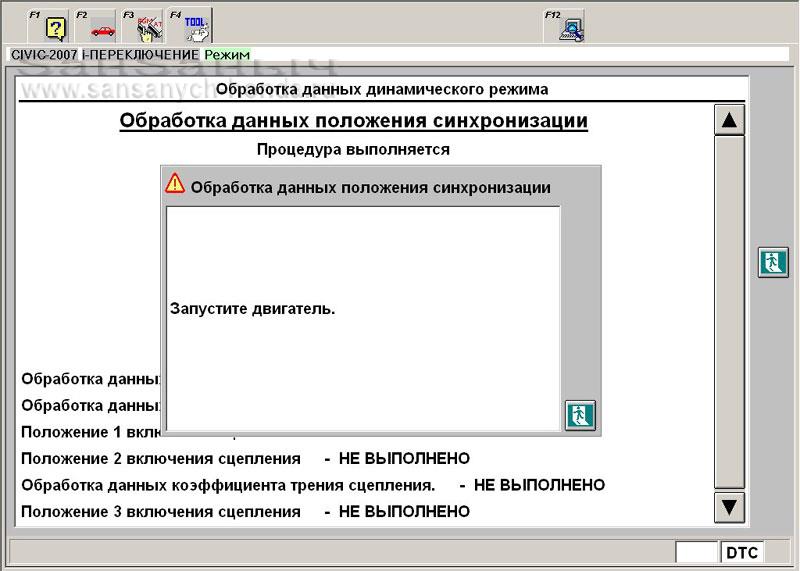
2. Программирование положений синхронизации.
 |
 |
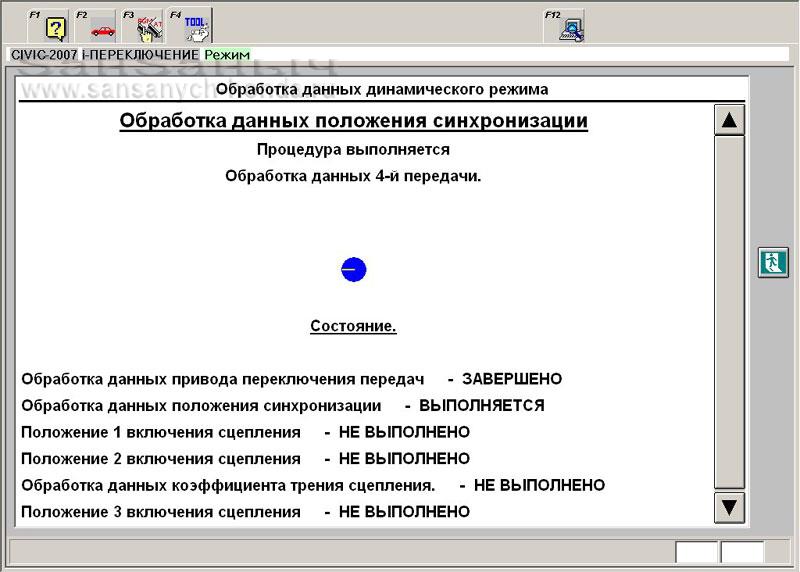 |
Для выполнения этого этапа запускается двигатель. Автомобиль удерживается на месте стояночным и рабочим тормозом (если в ходе выполнения хоть один из тормозов будет выключен, процедура будет остановлена). После запуска двигателя привод переключения передач поочередно делает попытки включения передач движения вперёд: 6-ю, 5-ю, 4-ю, 3-ю, 2-ю и 1-ю, до упора в синхронизаторы (сопротивление синхронизаторов определяется по падению оборотов двигателя). TCM запоминает время необходимое на преодоление сопротивления синхронизаторов каждой передачи.
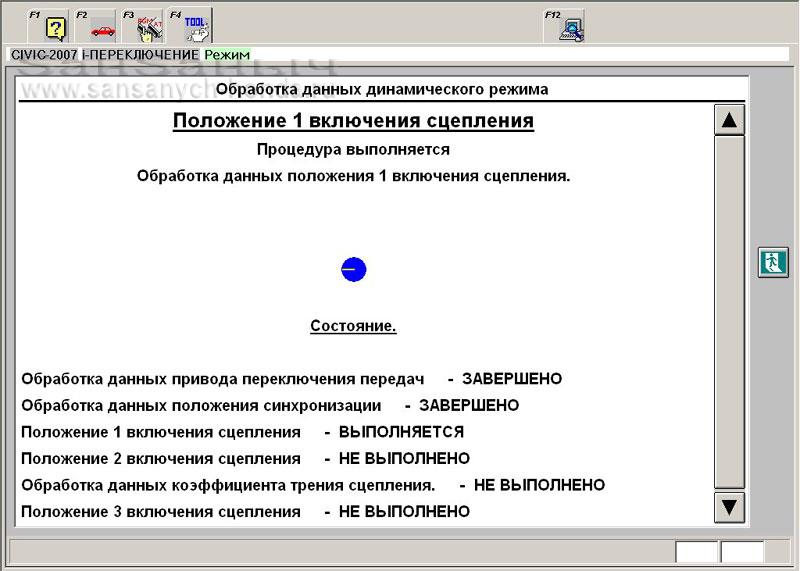
3. Программирование положения включения сцепления 1.
 |
 |
 |
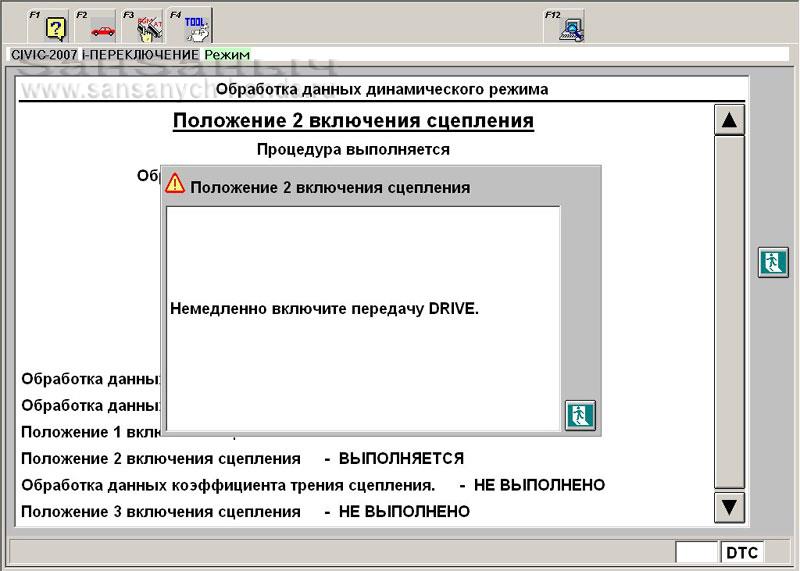
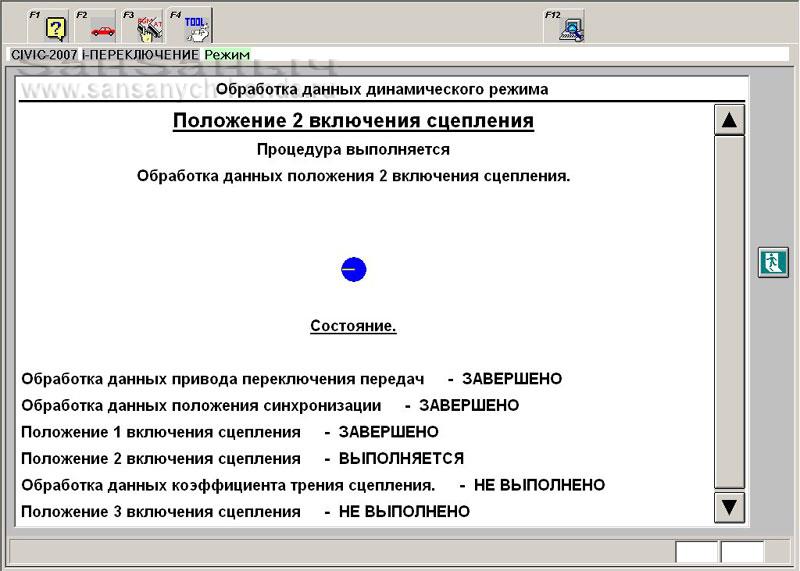
4. Программирование положения включения сцепления 2.
 |
 |
 |
Обе эти процедуры так же выполняются при работающем двигателе и требуют внимания от оператора, т.к. по команде HDS необходимо быстро включать и выключать селектор передач. Автомобиль по прежнему удерживается на месте стояночным и рабочим тормозом. Далее по команде программы оператор включает селектор в положение "A" (на это программа отводит 5 секунд, но с учётом заторможенности интерфейса реально у оператора на переключение остаётся 2-3 секунды). Далее TCM выключает сцепление, включает передачу и начинает плавное включение сцепления до момента начала падения оборотов двигателя. Так определяется точка начала "схватывания" сцепления. "Положение включения сцепления 1" запоминается как предварительная настройка.
"Программирование положение включения сцепления 2" выполняется так же, но с большей точностью, для этого привод сцепления быстро подводится к точке "Включения сцепления 1", а затем медленно включает сцепление до момента заметного падения оборотов двигателя и эта точка запоминается.
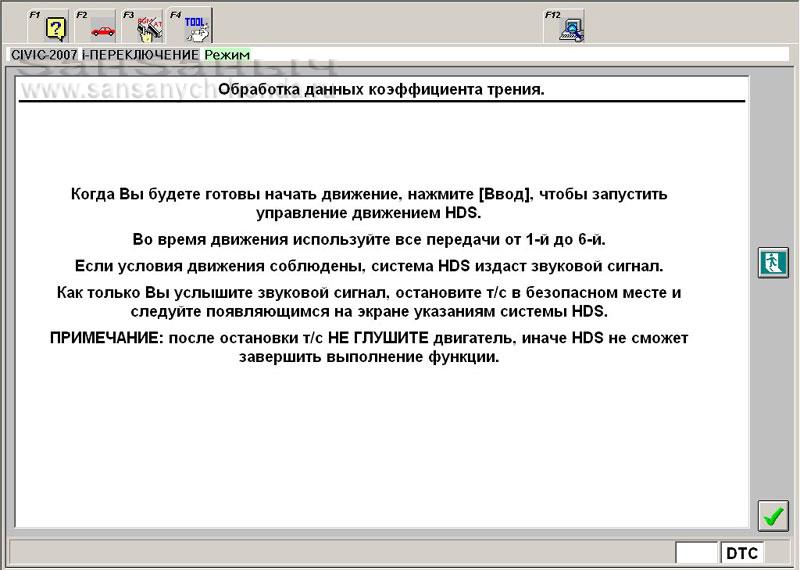
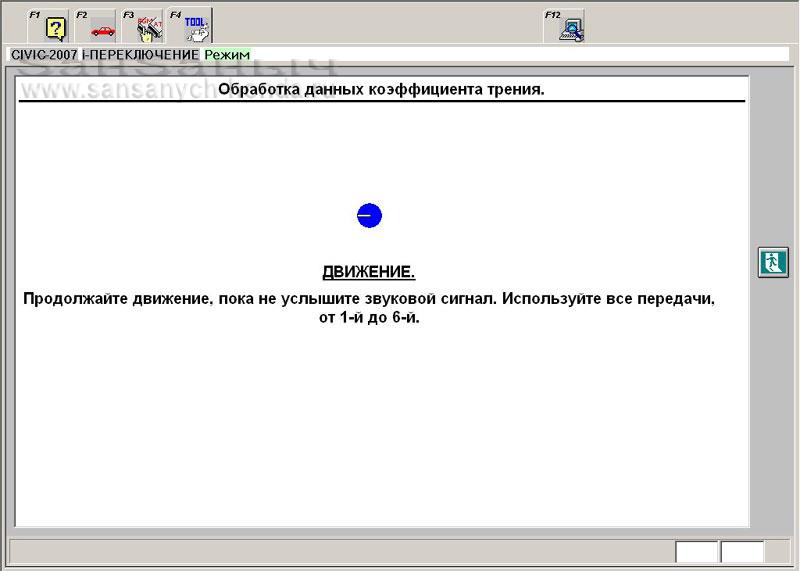
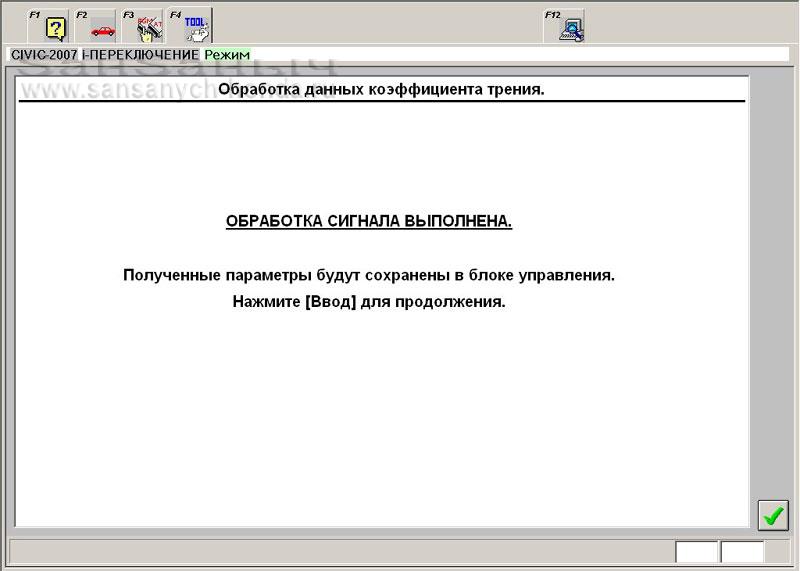
5. Программирование коэффициента трения сцепления.
 |
 |
 |
 |
 |
 |
Эта процедура выполняется только в движении по дороге (вывешивать на подъёмнике бесполезно). Коробка передач должна успеть переключиться на все передачи прямого хода от 1-й до 6-й, для этого необходим ровный участок протяжённостью 400-500 м. (ну в крайнем случае метров 300, на меньшем участке не успеть разогнаться до 6-й передачи).
Во время поездки можно передачи переключать вручную, надо только делать паузы между передачами. Количество поездок не ограничивается, процедура будет закончена только после того как будут задействованы все шесть передач.
В ходе этой процедуры TCM измеряет и запоминает коэффициент трения сцепления по разнице скоростей двигателя и первичного вала КПП (она вычисляется из скорости автомобиля и передаточного числа) в определённом положении сцепления. Это положение заложено в характеристиках сцепления хранящихся в базе данных HDS для каждой модели автомобиля и очевидно отмерятся от точки положения сцепления "2".
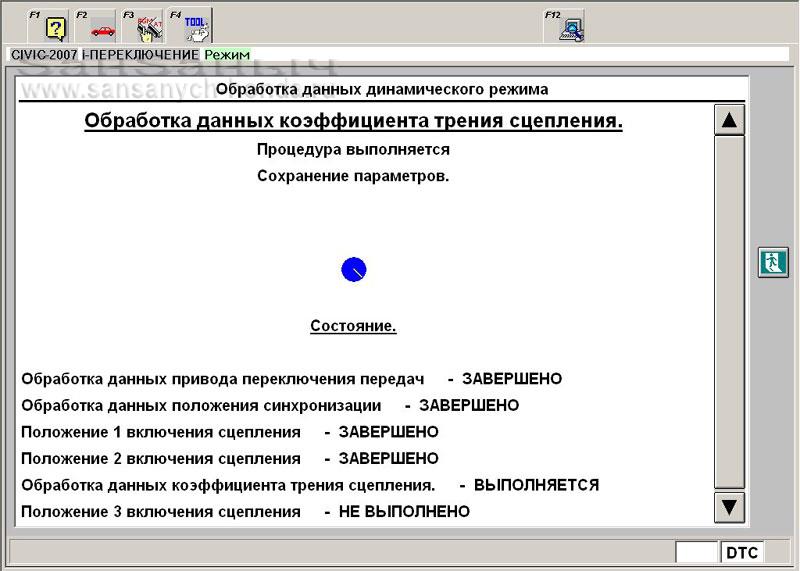
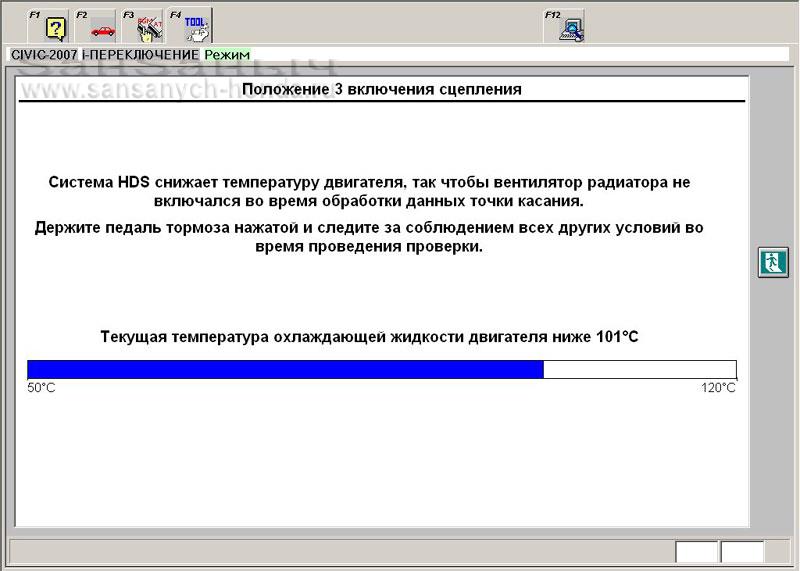
6. Программирование положения включения сцепления 3.
 |
 |
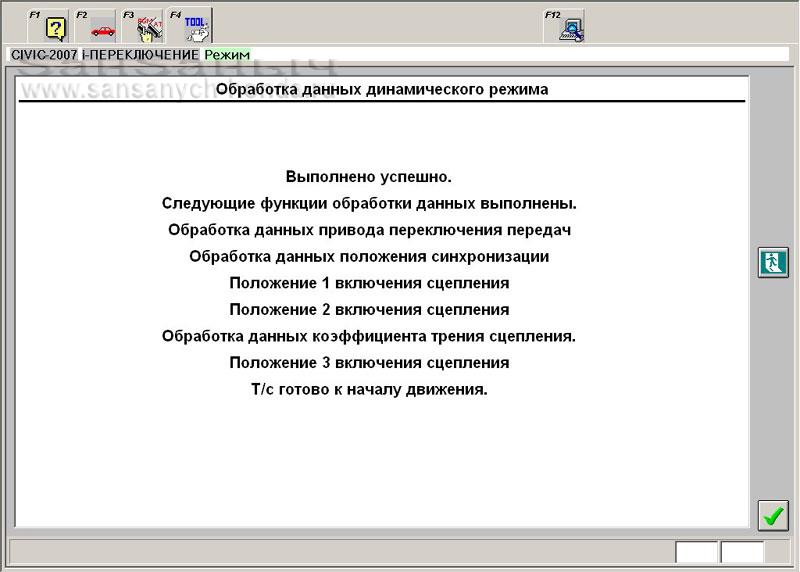 |
Эта процедура завершает процесс обучения. При статическом программировании данный этап следует 5-м сразу за программированием положения включения сцепления 2. При динамическом программировании после программирования коэффициента трения HDS если необходимо осуществит охлаждение двигателя, что бы вентиляторы не включались во время выполнения процедуры.
Далее автомобиль так же удерживается стояночным и рабочим тормозом, по команде HDS оператор включает и выключает передачу, а TCM несколько раз плавно включает сцепление и запоминает среднее положение "схатывания". Данное положение считается наиболее точным положением начала включения сцепления.
После успешного выполнения последней процедуры ТС готово к движению. Если по каким либо причинам программа будет прервана, TCM заблокирует включение стартера и эксплуатация автомобиля будет невозможна. В этом случае можно попробовать повторить программу.
Если даже несколько попыток выполнения обучения закончились неудачей, то необходимо устранить неисправность препятствующую выполнению процедуры.
Невозможность выполения программирования коэффициента трения сцепления можно попытаться обойти путём выполнения программирования в статическом режиме, тогда "проблемная" процедура будет пропущена. В этом случае стоит задуматься о возможной необходимости замены сцепления, но хотя бы автомобиль будет готов "на ходу".
 Если прерываются процедуры программирования положения сцепления, то можно попробовать чистку ДЗ с последующей "пропиской" - провалы холостого хода могут препятствовать корректному измерению положения включения сцепления.
Если прерываются процедуры программирования положения сцепления, то можно попробовать чистку ДЗ с последующей "пропиской" - провалы холостого хода могут препятствовать корректному измерению положения включения сцепления.
Если и это не поможет, тогда нужно проверять привод сцепления, обратить внимание на состояние тормозной жидкости в приводе, возможно выполнить её замену и/или прокачку (удаление воздуха из привода).
Ну и наконец возможно проблема в самом сцеплении: оно изношено и нуждается в замене, или сцепление заменено, но неправильно собрано, или при замене сцепления применялись неподходящие детали.
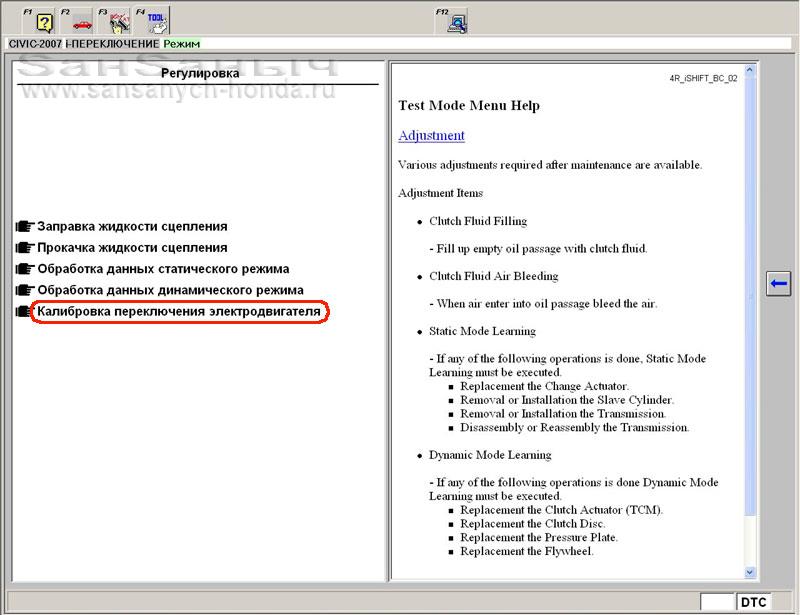 Если программа останавливается на этапе программирования положений привода переключения передач или положения синхронизации, то для начала необходимо вручную установить кулисы механизма переключения передач в среднее положение - если привод включения был оставлен в положении включённой передачи, то при включении привода выбора его может заклинить и процедура будет остановлена. После установки механизмов в среднее положение желательно выполнить калибровку элекродвигателей привода переключений. Если это не поможет, то нужно произвести обслуживание привода переключения передач.
Если программа останавливается на этапе программирования положений привода переключения передач или положения синхронизации, то для начала необходимо вручную установить кулисы механизма переключения передач в среднее положение - если привод включения был оставлен в положении включённой передачи, то при включении привода выбора его может заклинить и процедура будет остановлена. После установки механизмов в среднее положение желательно выполнить калибровку элекродвигателей привода переключений. Если это не поможет, то нужно произвести обслуживание привода переключения передач.
Обслуживание.
Какие мероприятия по обслуживанию "робота" следует проводить в рамках технического обслуживания?
1. Не забываем, что привод сцепления гидравлический и устроен точно так же как и тормозная система, поэтому там применяется тормозная жидкость.  По регламенту Honda для стран СНГ тормозная жидкость меняется через 36 месяцев независимо от пробега. И в приводе сцепления её тоже надо менять! Причём для этого нужна диагностическая система HDS, поэтому для выполнения данной процедуры придётся обращаться к дилерам или в сервис, где есть соответствующее оборудование. Почему то именно дилеры зачастую игнорируют привод сцепления - я с коллегами неоднократно наблюдал там тозмозную жидкость совершенно непотребного состояния при том, что в тормозной системе она была свежая, а владельцы машин заверяли, что предыдущее обслуживание проводилось только у дилеров (это вероятно из-за того, что в регламенте написано "Замена тормозной жидкости", но где именно не указано, а включать мозги похоже там не модно).
По регламенту Honda для стран СНГ тормозная жидкость меняется через 36 месяцев независимо от пробега. И в приводе сцепления её тоже надо менять! Причём для этого нужна диагностическая система HDS, поэтому для выполнения данной процедуры придётся обращаться к дилерам или в сервис, где есть соответствующее оборудование. Почему то именно дилеры зачастую игнорируют привод сцепления - я с коллегами неоднократно наблюдал там тозмозную жидкость совершенно непотребного состояния при том, что в тормозной системе она была свежая, а владельцы машин заверяли, что предыдущее обслуживание проводилось только у дилеров (это вероятно из-за того, что в регламенте написано "Замена тормозной жидкости", но где именно не указано, а включать мозги похоже там не модно).
2. Трансмиссионное масло в КПП меняется точно так же как и в обычной МКПП - через 48-60 тыс км. в зависимости от условий эксплуатации.
Теперь о работах, которые не предусмотрены регламентом, но с них следует начинать при возникновении подозрений на некоректность работы "робота" (ествственно я исхожу их того, что все работы по регламенту выполнялись вовремя):
1. Обучение системы при помощи HDS. Предпосылками для этого являются: некорректная работа сцепления при трогании, рывки или кратковременные пробуксовки при переключениях передач. Это как правило помогает решить проблему, ведь в процессе работы сцепление изнашивается и настройки привода сцепления сбиваются, а обучение восстанавливает корректные настройки.
 2. Обслуживание привода переключения передач, которое заключается в чистке и смазке шестерёнок и зубчатых штоков. Предпосылками для этого является обнаружение TCM неисправностей привода переключения передач например: P0780 (165-2) Неисправность системы переключения передач; P0919 (162-6) Истекло запрограммированное время нейтрального положения исполнительного механизма переключения передач. Неисправность вызвана заедаением штоков привода из-за накопления продуктов трения и высыхаия смазки. После сборки привода обязательно выполнение процедур калибровки привода и обучения системы.
2. Обслуживание привода переключения передач, которое заключается в чистке и смазке шестерёнок и зубчатых штоков. Предпосылками для этого является обнаружение TCM неисправностей привода переключения передач например: P0780 (165-2) Неисправность системы переключения передач; P0919 (162-6) Истекло запрограммированное время нейтрального положения исполнительного механизма переключения передач. Неисправность вызвана заедаением штоков привода из-за накопления продуктов трения и высыхаия смазки. После сборки привода обязательно выполнение процедур калибровки привода и обучения системы.
Заключение.
Надеюсь, что после прочтения этой статьи система "i-shift" от Хонды не будет уже пугать своей нерпедсказуемостью.
В заключении хочу ещё раз акцентировать внимание на следующих особенностях "робота":
- крайне нежелательно стоять на месте с включённой передачей (режимы "A" или "R"). В городе нужно ехать примерно так: включил передачу - поехал, остановился на светофоре - выключил передачу, загорелся зелёный - включил передачу, поехал дальше; этим Вы продлите жизнь сцеплению.
- будет совершенно нелишним проводить обучение "робота" в профилактических целях присовокупив эту процедуру к плановому техническому обслуживанию автомобиля. Как часто? По моему субъективному мнению не реже раза в 45-50 тыс. км пробега или раз в два года. В зависимости от условий эксплуатации эту периодичность нужно корректировать. Например при постоянной езде по московским пробкам обучение лучше проводить каждый год.
Ну и в самом конце немного о диагностике. Как и любая электронная система, "i-shift" имеет собственную систему самодиагностики. При обнаружении неисправности у "робота" на приборной панели автомобиля загорается индикатор ![]() . В таком случае рекомендую не игнорировать это, а в кратчайшее время сделать диагностику. Если этого не сделать и не устранить неполадку, то следующая неисправность может привести к блокировке стартера и тогда до сервиса своим ходом Вы уже не доедете. Если индикатор неисправности загорелся после продолжительного толкания в пробке, остановитесь (так что бы не мешать другим участникам движения) и постойте на месте с ВЫКЛЮЧЕННОЙ передачей минут 15, двигатель при этом глушить не обязательно. Возможно TCM "заподозрил" перегрев сцепления.
. В таком случае рекомендую не игнорировать это, а в кратчайшее время сделать диагностику. Если этого не сделать и не устранить неполадку, то следующая неисправность может привести к блокировке стартера и тогда до сервиса своим ходом Вы уже не доедете. Если индикатор неисправности загорелся после продолжительного толкания в пробке, остановитесь (так что бы не мешать другим участникам движения) и постойте на месте с ВЫКЛЮЧЕННОЙ передачей минут 15, двигатель при этом глушить не обязательно. Возможно TCM "заподозрил" перегрев сцепления.
Расшифровку кодов неисправностей можно найти в разделе "Документация": Коды неисправностей "i-shift" Honda Civic 07 г.в.

